
Navigation
Navigate the mobile robot to a designated position within the constructed environment, and integrate machine vision to enable the robot to identify and move towards a box with a specific number.
Apr 1, 2024
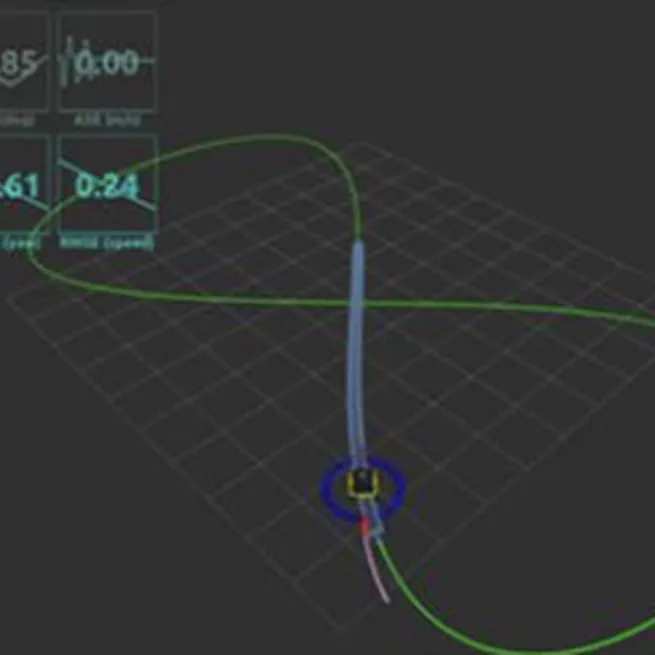
MPC
Use MPC to control a mobile robot to follow a predetermined trajectory.
Mar 15, 2024
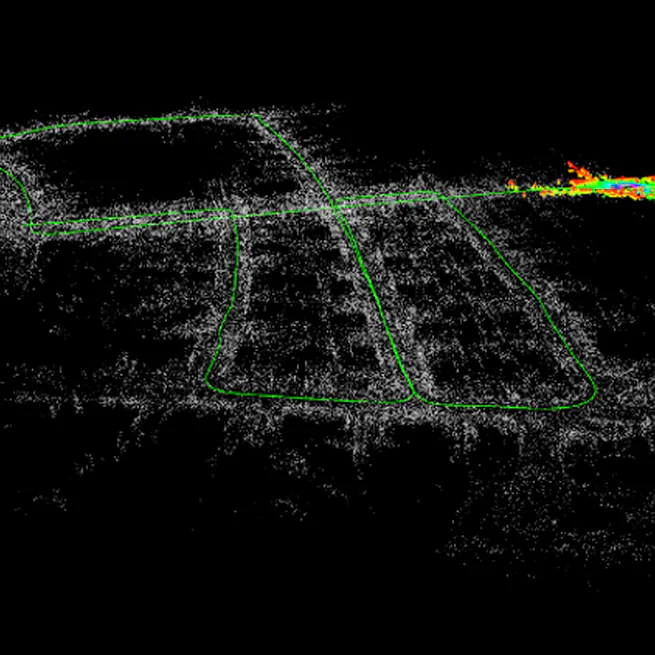
SLAM Algorithms
Apply existing SLAM methods for mapping.
Mar 1, 2024