Injection Manipulator
Apr 13, 2024
·
1 min read
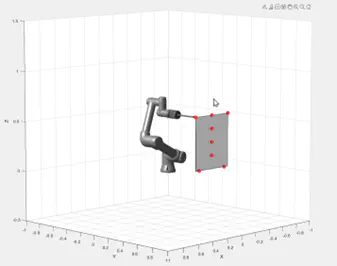
This project first establishes a robotic arm model using forward kinematics, then uses inverse kinematics to calculate the joint angles corresponding to the desired pose, and finally obtains the trajectory.