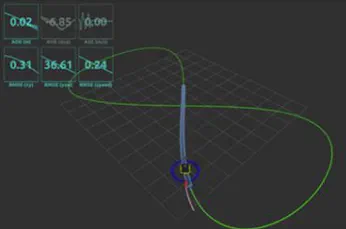
MPCMar 15, 2024 · 1 min readGo to Project SiteUse MPC to control a mobile robot to follow a predetermined trajectory.Last updated on Mar 15, 2024ROS1 AuthorsYu ZhuoyuanMaster Student ← Navigation Apr 1, 2024Trajectory Plannning Mar 15, 2024 →