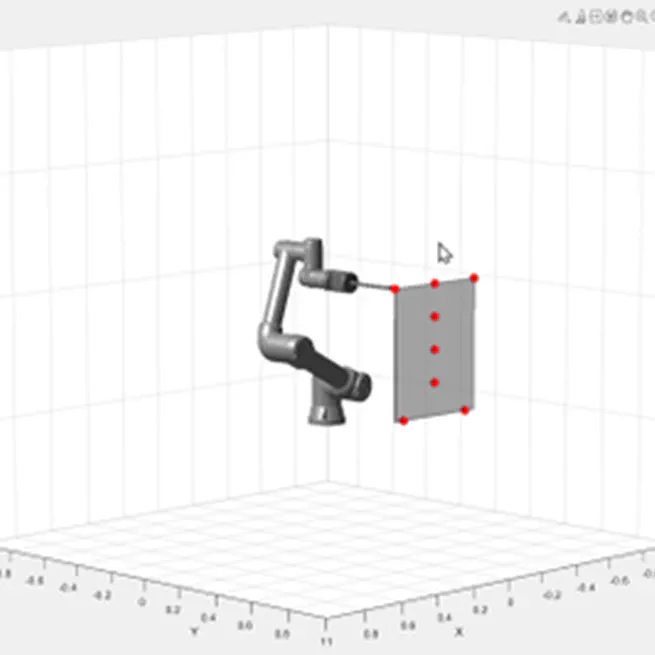
Injection Manipulator
This project first establishes a robotic arm model using forward kinematics, then uses inverse kinematics to calculate the joint angles corresponding to the desired pose, and finally obtains the trajectory.
Apr 13, 2024

Navigation
Navigate the mobile robot to a designated position within the constructed environment, and integrate machine vision to enable the robot to identify and move towards a box with a specific number.
Apr 1, 2024
Trajectory Plannning
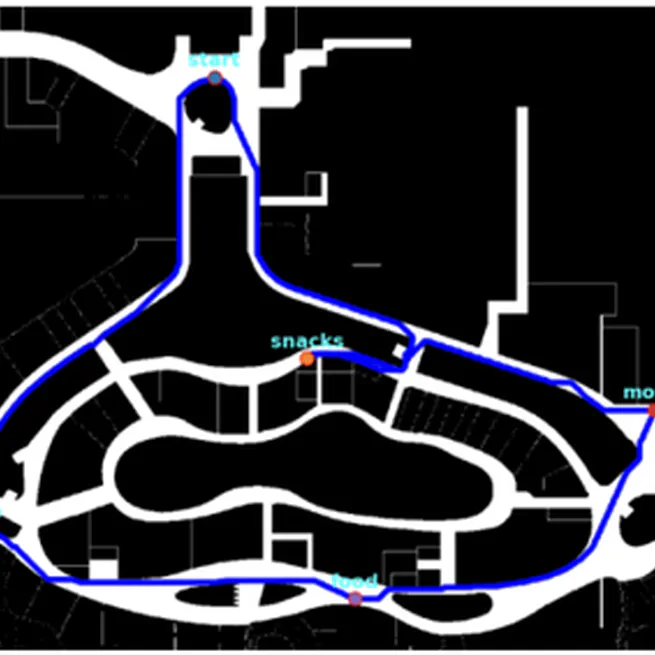
Find the shortest total path in the given map to solve the Traveling Salesman Problem (TSP).
Mar 15, 2024
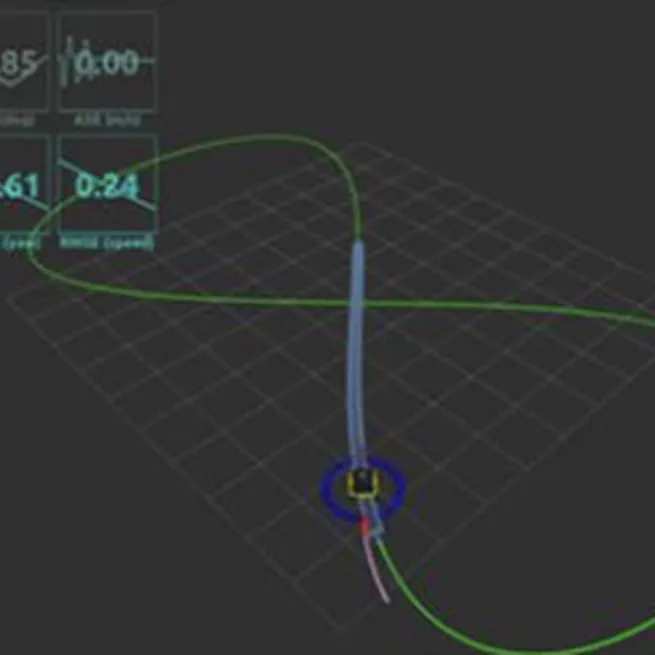
MPC
Use MPC to control a mobile robot to follow a predetermined trajectory.
Mar 15, 2024
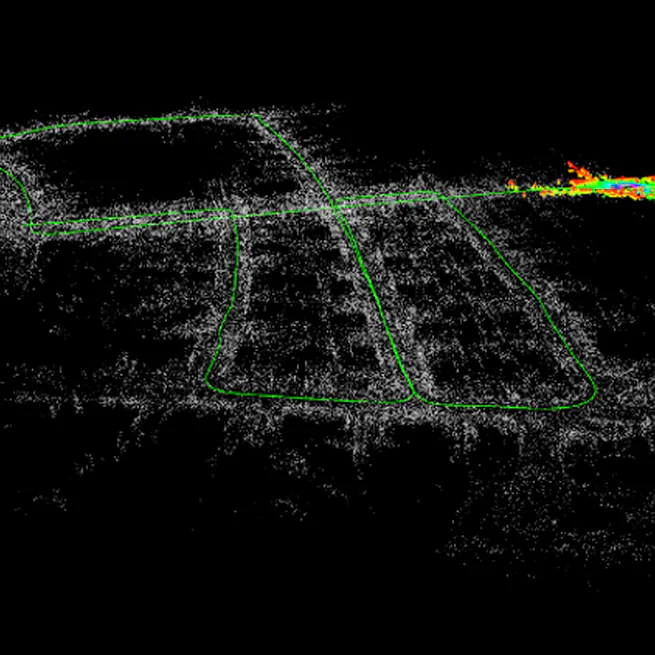
SLAM Algorithms
Apply existing SLAM methods for mapping.
Mar 1, 2024

Perception
Identify and track a given target, while predicting its acceleration and velocity.
Feb 15, 2024